Reply with Quote
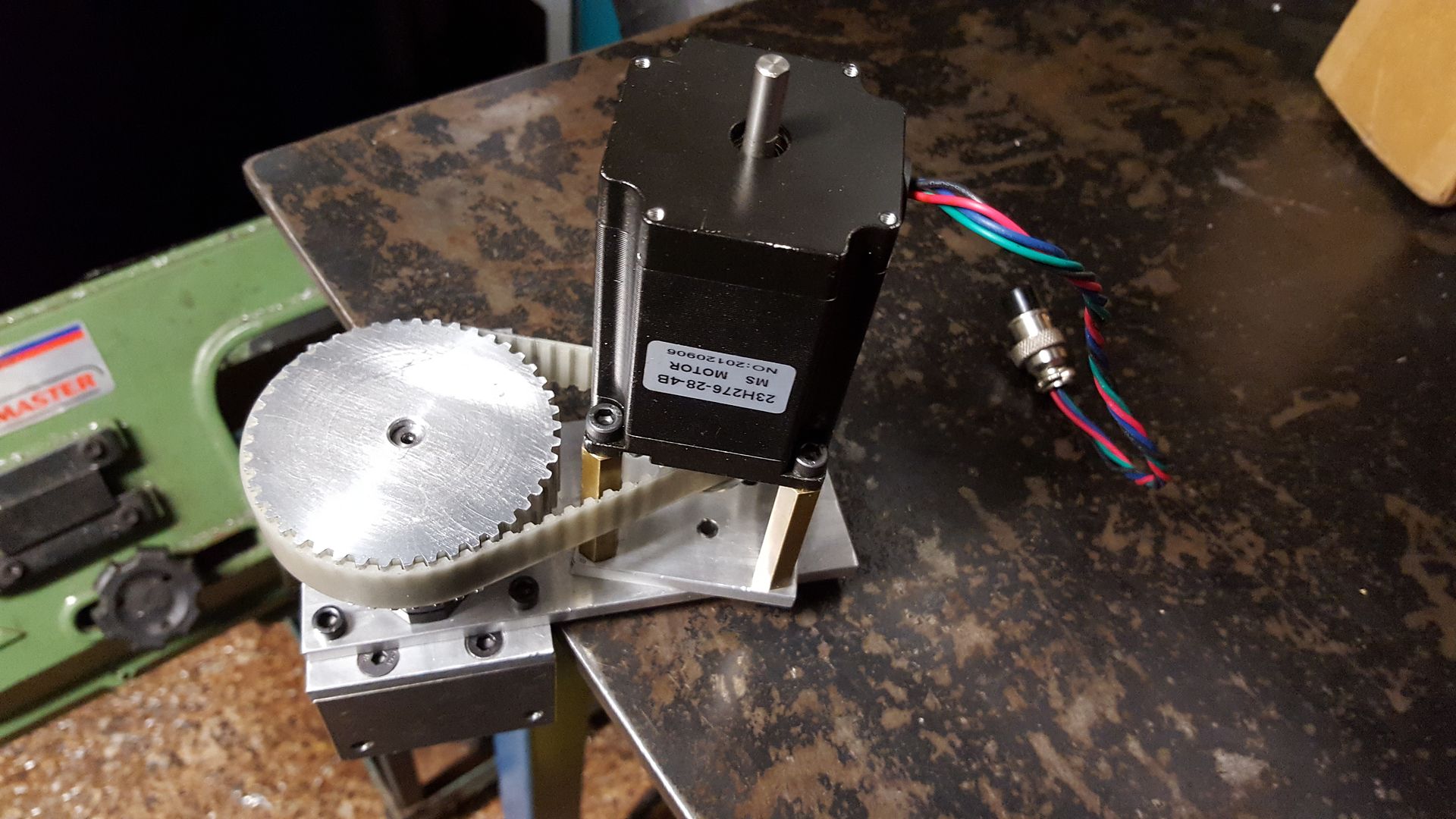
Reply with QuoteI was stopped from making this mistake as I made this when I made this
then someone said it would not work as the travel per revolution was too much and it would vibrate as quoted below
Does that sound like your machine?Two problems with that setup:
The pinion is to big so you will have around 10cm of movement for one revolution of the motor
To much vibration at low speeds
Resulting in jerky movement and the end result.
Lowering the current to the motor will mitigate both problems to a certain extent, at the cost of speed and acceleration.
From experience, you need about 1-2.5cm of movement per motor turn, so use of reduction is necessary.
Move the motor to the side and slap 2 pulleys at 1:3 to 1:5 ratio, that will do nicely.
Do try it as is, later you do improvements.
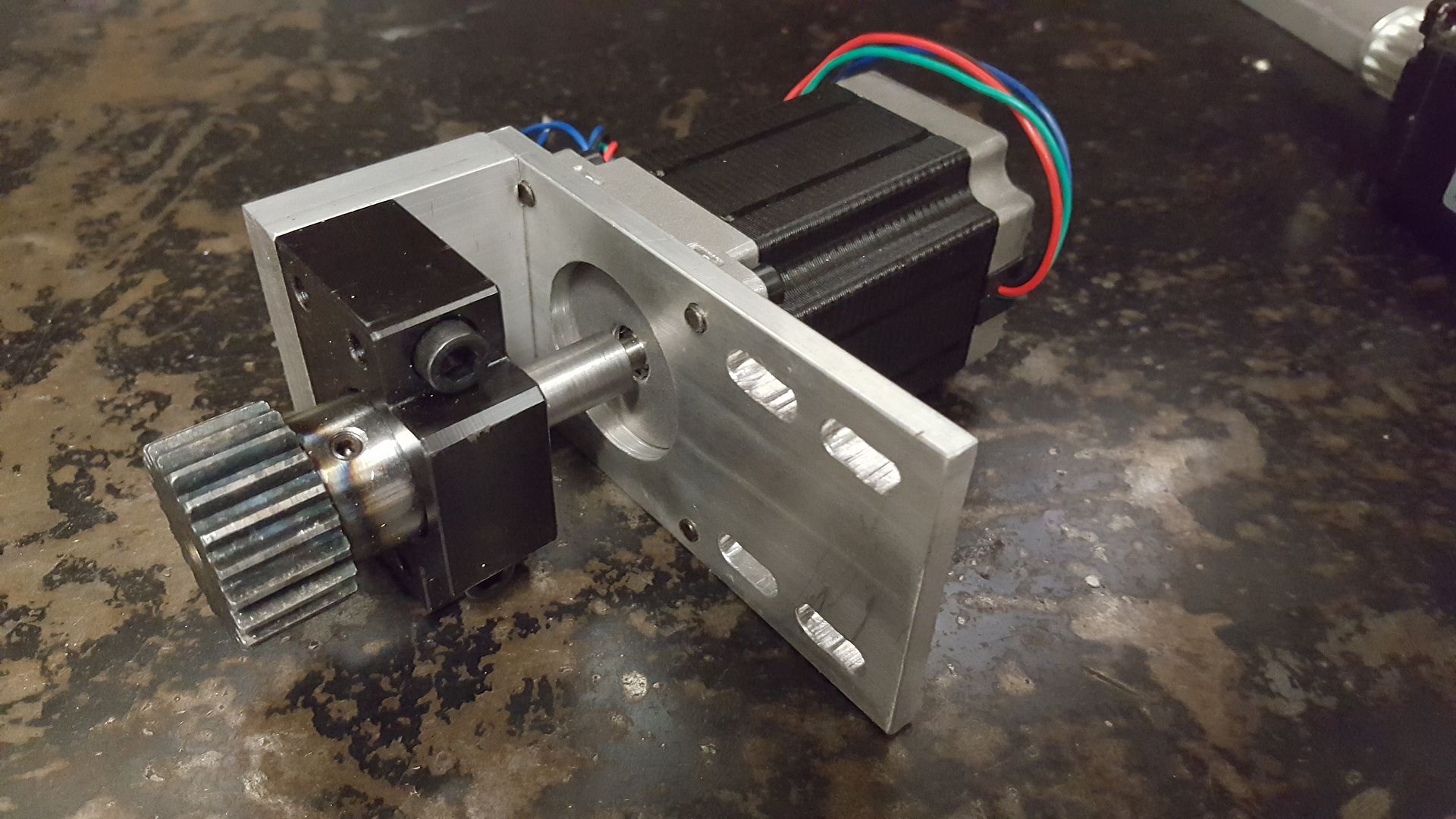
I thought I was doing 30mm per revolution, but I would have done 94mm. I knew it needed to be about 20-30 mm per revo so I took their advice and added a 3:1 reduction drive which got it in the ball park.
I built this so it would bolt up to the existing NEMA 23 mount. Now it is built, it works perfectly. One day (soon I hope) I will actually cut something!
The drives on the table have a 5:1 reduction and they work nicely too.