Reply with Quote
Reply with Quote
Hi Naveen,
A DSP is optimized for high-speed, numerical, real-time computations. KFLOP's DSP is rated for a peak 1.2 GFLOPs (Billion Floating Point Operations per second). A DSP can also perform operations like a standard CPU or Microprocessor. The DSP performs serial tasks on microsecond time scales such as PID servo calculations and trajectory generation.
An FPGA is a massively parallel programmable low-level logic device. KFLOP's FPGA is rated as 100,000 logic gates. It can be configured to perform simple tasks like Step Pulse Generation or Encoder Quadrature Counting at rates that a processor could never achieve. Also unlike a processor, which basically executes in a serial manner, the operations performed by an FPGA operate concurrently in parallel. An FPGA can perform tasks on a nanosecond time scale.
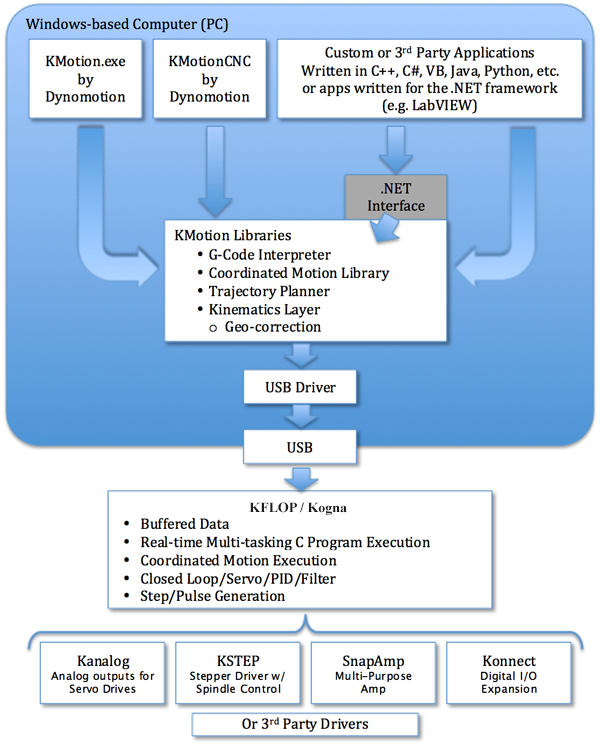
Although KFLOP has some stand-alone capability, the KMotion Architecture is designed to work with a PC. A PC adds almost unlimited resources of Virtual Memory, Disk, Networking, Display, Graphics, Keyboard, Powerful Development Tools, etc.- but is not real-time and operates on millisecond - to second - time scales . So in the KMotion Architecture operations that do not absolutely need to be performed real-time, are more easily handled in the PC. These include the GCode Interpreter, Trajectory Planning, Kinematics, GUI, etc... See:
HTH
Regards